

Ivan N.
Neelankavil - - - - - Principal Investigator of Nurosym Lab - - - - - Member of Robotics Lab - - - - - WISRD Board - - - - Ivan
Neelankavil - - - - - Principal Investigator of Nurosym Lab - - - - - Member of Robotics Lab - - - - - WISRD Board - - - - Ivan
Images and Figures
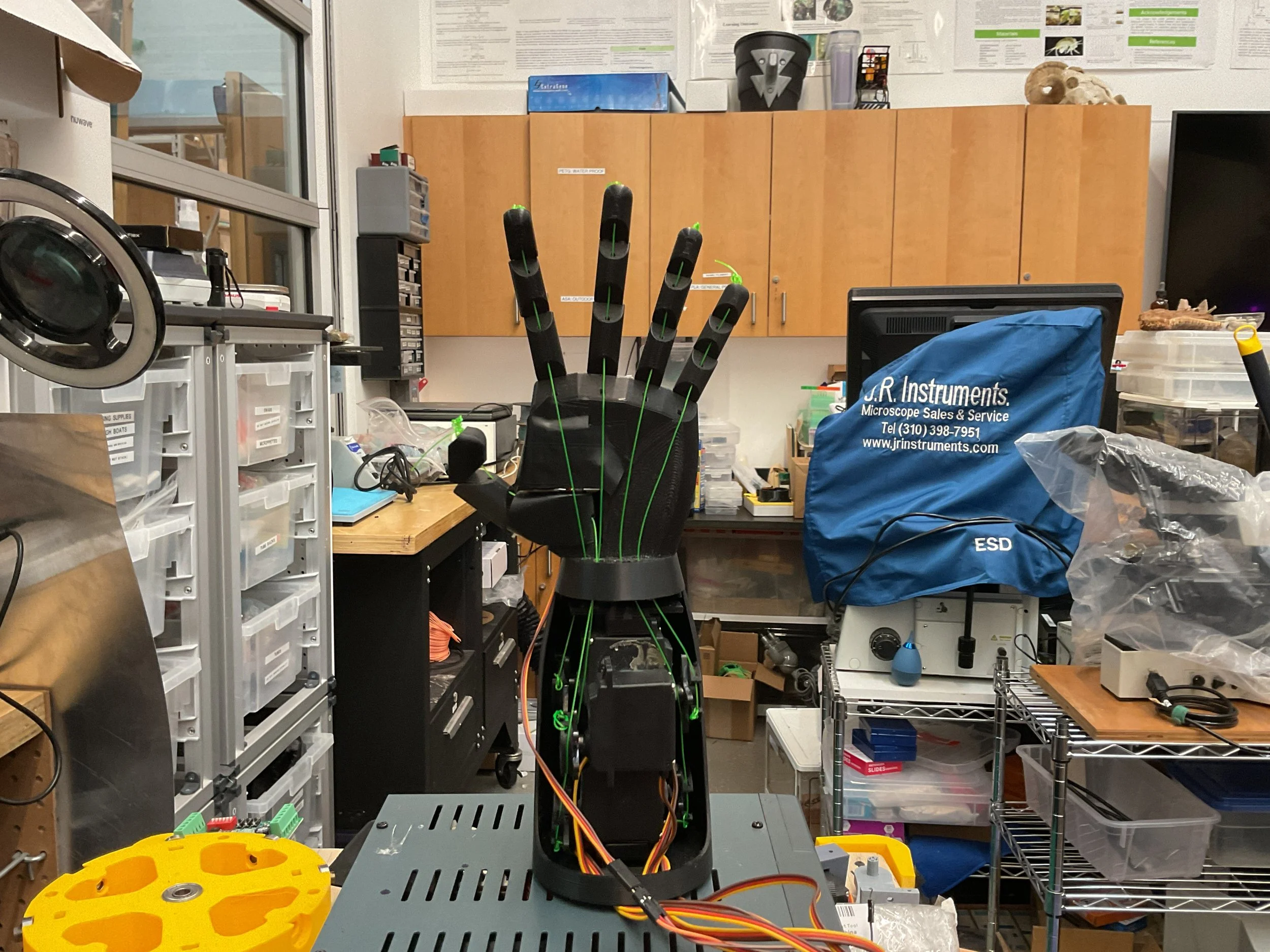
Figure 1: Front of anthropomorphic robotic manipulator

Figure 2: Back of Anthropomorphic robotic manipulator
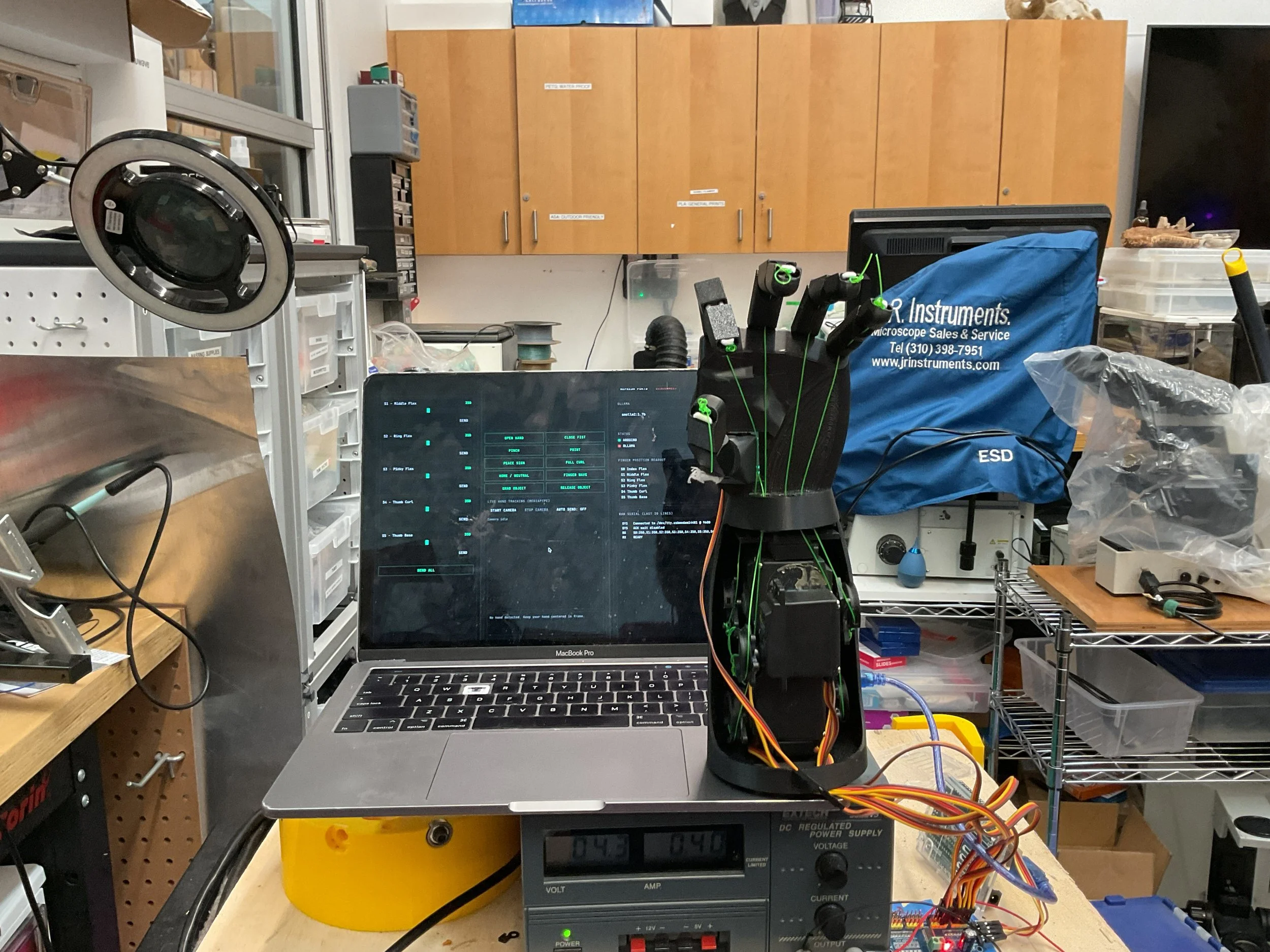
Figure 3: Anthropomorphic robotic manipulator with custom softwear
Lab Journal
-
4/27/26
This past week, I have been working on both Nurosym and the robotic hand. Other than that, I have been trying to get the software to run on my Mac. I eventually got it to work. The software allows me to control the arm, so it has buttons that give me simple positions, such as open hand, closed hand, etc. However, there is also a camera that will mirror your movements.
4/16/26
For the arm, I am working back on it and have worked with Guy G to be able to control the arm via software. I am now working on making an opposable thumb, and that will probably be the last touches on the arm before the poster session. As for the Nurosym, we are continuing to gather data. We hope to get the last participants before the poster session.
3/17/26
I got my lab reviews back, and the feedback was really helpful. For the robotics lab, the main feedback I got was surrounding my research question and publication. I don’t really have a good question to guide my research, and no clear publication goal. Over the rest of the week, I want to take a step back from Nurosym during class and really focus on my goal for the lab. Answering this question will help guide me and make my project clearer, and give me a clear direction.
3/13/26
Today, I got all fingers to move together, and I can edit the code to include/exclude certain servos that represent fingers, so I can do simple hand gestures. I think that there isn’t much more I can do, so after I finish the Nurrosym, I think I will start a new project. I want to continue doing robotics, so I think I will make a more complicated arm next.
3/9/26
The lab procedure for collecting data goes as follows. They will come into the WISRD Room and will sit down for 5 minutes. After 5 minutes, we will take their int. heart rate, blood pressure, blood oxygenation, and cortisol. We will then put the Nurosym device on the left tragus, located on the ear. Prior to this, we make sure the spot is wet by asking the participant to dip their hand in water and spread it in their ear. Once this part is finished, we will turn the device on. We will increase the frequency by 1 every 2 seconds until they say they feel a tingle. If they were in the placebo group, the device would shut off after 2 minutes. They would then sit without the device stimulating the vagus nerve. If they were in the real group, the Nurosym would be on for the whole of the 30 minutes. After the time is finished, we immediately take their int. heart rate, blood pressure, blood oxygenation, and cortisol once more. The device is then cleaned with alcohol wipes, and we can move on to the next person.
3/6/26
Last lunch, I tested the first person with the Nurosym device. It went very smoothly, and I was able to get their saliva before and after, int. and post heart rate, and the blood oxygenation. We will keep testing people at lunch over the next few weeks.
3/3/26
The Nurosym device arrived on Monday. I have started to make a spreadsheet for the data we need to gather, and we hope to start testing next week.
2/24/26
For future reference, this is how you set up my arm. I use an Arduino UNO board. I also use a PCA9685 16-Channel 12-bit PWM Driver. All of the servos are Tower Pro SG-5010. All of the servo wires connect to the PWM driver, matching the servo wires to the color of the board under the pin. From the PWM Driver, wires run to the Arduino UNO. GND —> GND, SCL —> A5, SDA —> A4, and VCC —> 5V.
2/18/26
After lots of troubleshooting, I finally got all my fingers connected to a single board. They all moved on their own, and now I have to code the arm. I am very proud of the work I have done, but I am still not finished.
2/6/26
Over the week, Lucian and I have been writing the lab procedure. We got around the budget problem by contacting Dr. Elisabetta Burchi, with whom we hope to collaborate, as she promised to give us the necessary tools to conduct the study. I have been working on an interest form, as well as the connect form, while we finish the procedure. Dr. Burchi will look over it, give her feedback, and then we will proceed.
1/30/26
In a joint project with WIE Member Lucian S, we have started research for a study on the vagus nerve (VNS). We hope to stimulate it by using a device called Nurosym. This is like ear buds, where if you wanted to stimulate it normally involves surgery. They make some pretty big claims about what the device can do, and we want to see if they can do what they say they can do.
1/21/26
Built and tested the servo block for the arm. One piece of the paper airplane got printed. I will continue working on the arm for the rest of the week.
1/16/26
I saw a video of this guy turning a paper airplane into a remote-controlled one by adding two propellers to the back. He also added a camera to the front so you could see it flying. I want to go build this, and it requires wiring skills I don’t have, so this could be a great project for me to learn new skills. Everything I need is linked in this spreadsheet.
1/8/26
Started version 2 of my arm. I have all the screws, and I made good progress.
1/7/26
Worked on my article about artificial sweeteners. Made some good progress.
1/6/26
This semester, I plan to rebuild and complete my full arm while coding it to mirror human movements. I also plan to write an Inquirer article about artificial sweeteners. For the rest of the week, I plan to finish it. Some peer advice I want to integrate this semester includes always planning out the next step, coming into class with a goal, and finally, holding myself accountable and being grateful for the opportunities that come with being in WISRD.
12/19/25
I have to reprint the entire arm because I used the wrong screws, which messed up the structure of some parts, and now it can’t fully turn. Since this is the last day of the semester, there is very little I can do except wait until after winter break to start working on my arm. I plan to get the right screws and start building right away to give me as much time to build and code the arm.
12/15/25
Using a Dremel to cut a screw-down beacuse the one I was currently working with was too long. Arm can’t really progress until I fix the problem. Hopefully want to fix it by the end of class, at least by next class.
12/8/25
Worked on installing the servo block. Ran into a problem with the forearm because the servo screw got stripped when I was trying to tighten it. Planning on fixing that next class, as well as screwing in the servo block. Inspired by Charlie’s finger, maybe could do the same with mine?
12/5/25
While testing how the servo for the thumb was working, the horn snapped because it was holding too much, so I spent class fixing it. I also double-checked my poster for tonight’s session.
12/2/25
On the first two days returning from the break, I finished my poster. I had some time on Tuesday to attach the fingers to the main part and superglue them to the main base. The arm is coming along nicely, and I plan to attach the servos next.
11/19/25
Last class, I ran into a problem with the forearm connecting to an external piece. A servo horn is attached to the forearm, and the actual servo is on the external piece. The goal is to attach the servo to the servo horn, then put a screw in to connect it. The problem is can’t find the right screw, and the servo is mounted too far away from the horn, so that sometimes it can’t fit into it. In this class, I want to fix this problem and continue working on my arm. Once I feel comfortable with the progress of my arm, I will start my poster and hopefully show all of the arms I have worked on.
11/10/25
I am thinking of printing a design I found on Thingiverse. To build this, I need a Nylon Cord, 5 MG958 Servos, 1 MG90S servo, and then fishing line between .5mm and .8mm. I also need to 3D print the parts. I am looking forward to building this over the next two weeks. Once I am finished with this, I am looking to continue in the area of robotics and hope to maybe add sensors to mirror the hand to the robotic hand.
11/3/25
For the arm, we obviously need bionic fingers. For the first design at least, I am thinking of 3d printing fingers, and then to control them, I would attach a string to them and then link that to a servo so that I could control how much the finger goes in. Once I came up with a design I liked, I would then replicate it with the other fingers so I could get 5 fingers. I haven't thought of how the finegrs would come together, but I have an idea of where to start.
10/27/25:
Looking into the future, I want to develop a full bionic arm. With my previous knowledge of 3D printing, servos, and coding from working on all the other smaller arms, I should be able to get a good starting point. My first step would be research, followed by a 3D model, and then I would start building. This is not going to be an easy project, and it will take time and hard work.
10/17/25
In the limited time I have had to work on my arm, I have been redesigning the base. I included a place where the bottom servo wire could run through. I have also added a place where I can add weights to balance it out, because if the arm goes too far back, it will start to fall off where it is supposed to be mounted. I am going to now work on the code for the arm in hopes of getting it to draw simple objects/shapes.
10/6/25
Last class, I attached the mount to the arm. I drilled a hole into the mount because there is a servo at the bottom of the arm, so I had to do that because I needed to run a wire from the servo to a board. I then connected all of the servo wires to a smaller board. Wires ran from the Arduino Uno, which was connected to the computer, to the smaller board where all the servos were connected. I am in the process of connecting the smaller board to a voltage regulator circuit and then programming the arm to have all servos move out of one board.
10/1/25
I was able to get a mechanical arm to move. It was made up of 4 servos, and I can get each one to move by itself, but I am in the process of trying to connect all servos to one board, and hopefully then I could attach some sort of writing device, and maybe I could program it to be able to write/draw something. I am also in the process of 3D printing a mount because if I want it to move standing up, I have to use a foam base. Hopefully, by the time class ends, I can have all the servos connected to one board.
9/26/25
Last class, I got all the fingers to move back and forth. To get it to move, I plugged the brown servo wire into the GND pin on the Arduino Uno. I then plugged the orange wire into the 5V pin right next to the brown wire. The yellow wire then went into the 9-pin. Note that there were jumper wires between the servo’s wire and where they plugged in. Once they were connected, I plugged the blue USB-Cord into the input for the Arduino Uno and the USB into the WIRSD computer. I then ran the Arduino IDE. Once I was in the app, I clicked file, then examples, then servo, then sweep. This has written basic code that could make the finger move back and forth. For the rest of this class, I want to figure out how to make all the fingers work at once. Then I want to figure out how to assign a position to each finger so it can play rock, paper, scissors.
9/19/25
In the last class, I conducted research on what it would be like to design a launch monitor for a golf simulator. I came across an interview where this guy interviewed the founder of a company called PiTrac. The cool thing about this is it's all DIY, but they don’t sell any actual parts. They just give you the recommendations for the parts. You have to buy all of the parts yourself, but they provided the instructions. If I were to do this, I would need to modify a specific type of camera and 3D print some parts. This would be a challenging project as it involves lots of skills I don’t know how to use. It would include soldering, 3D printing, modeling, and lots of research. This would be a big project, and if I continue to try and aim for my bigger goal of finishing this simulator, this would just be the first step.
9/17/25
Over the past week, I have been trying to fix a prosthetic hand that could play rock, paper, scissors. I tried just plugging an Arduino Uno with an SG92R Servo into the WISRD computer. The first one I tested didn’t work because it was a faulty servo. I tried another one, and this time it worked. I have been able to get the servo to work, so I moved on to trying to make the hand work again. The first problem I ran into was that one of the fingers wasn’t connected to the servo, so I drilled a hole and attached it. The second problem I encountered was that the same servo that wasn’t connected also failed to function. I find all of this interesting, but I think my interest might be in another project.
The goal of this project is to create a 3D printed hand that can fully operate and function with human control, inspired by a human hand. We hope to replicate fully functional arms that can be piloted by a human or Gen AI control. By 3D Printing parts, we hope to create a cost-effective and iteration-compliant solution while maintaining function and structure.